Tactile Grip Force and Pressure Sensing
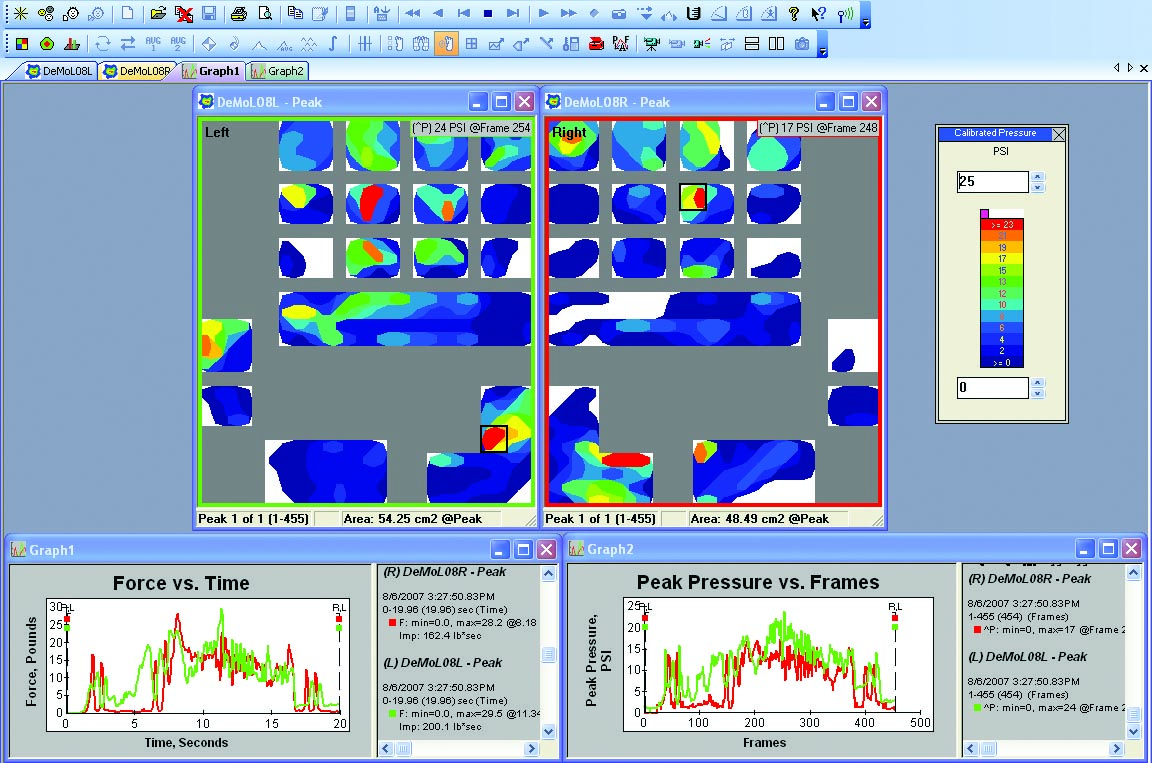
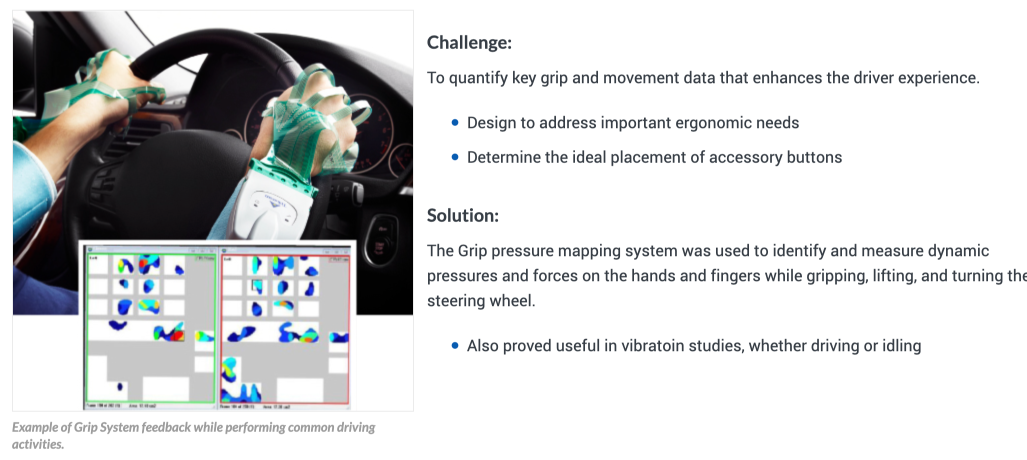
The Grip™ system measures and evaluates static and dynamic pressures from grasping objects. Grip measures interface pressure for human hand and finger gripping applications to assess comfort, design, and ergonomics. The system is used to improve design for a more ergonomically sound product, study carpal tunnel and repetitive motion syndrome, or analyze the human hold on various tools and sports equipment. It is an ideal tool for collecting vital information and insight to enhance product design, manufacturing, quality, and research.